Header file with declarations and macros for hardware UART. More...
#include <stdio.h>#include <avr/io.h>#include <util/setbaud.h>#include "../../common/enums/UART_enums.h"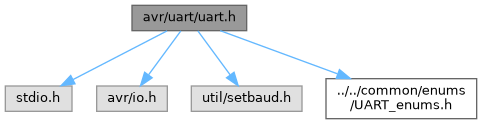
Go to the source code of this file.
Macros | |
| #define | F_CPU 12000000UL |
| System clock frequency definition. | |
| #define | UART_BAUDRATE 9600UL |
| Default UART communication baud rate. | |
| #define | BAUD UART_BAUDRATE |
| #define | UART_DATASIZE 8 |
| Number of data bits per frame (5-8). | |
| #define | UART_PARITY 0 |
| Parity bit configuration. | |
| #define | UART_STOPBITS 1 |
| Number of stop bits per frame (1-2). | |
| #define | UART_RXC_ECHO |
| Enables local echo of received characters. | |
| #define | UART_HANDSHAKE 0 |
| Flow control / handshaking mode. | |
| #define | UART_HANDSHAKE_XON 0x11 |
| XON character (transmit when ready to receive). | |
| #define | UART_HANDSHAKE_XOFF 0x13 |
| XOFF character (transmit when not ready to receive). | |
| #define | UART_STDMODE 1 |
| Standard I/O integration mode (printf/scanf). | |
Functions | |
| void | uart_init (void) |
| Initialize the UART hardware interface with configured parameters. | |
| void | uart_disable (void) |
| Disable the UART hardware interface and reset configuration. | |
| char | uart_putchar (char data) |
| Transmit a single character via UART (blocking). | |
| int | uart_printf (char data, FILE *stream) |
| UART printf stream handler for stdout redirection. | |
| char | uart_getchar (UART_Data *status) |
| Blocking receive single character via UART. | |
| UART_Data | uart_scanchar (char *data) |
| Non-blocking check for received UART data with error handling. | |
| UART_Error | uart_error_flags (void) |
| Check and clear UART receive error flags. | |
| int | uart_scanf (FILE *stream) |
| UART scanf stream handler for stdin redirection. | |
| void | uart_clear (void) |
| Clear UART input stream errors and discard pending character. | |
Detailed Description
Header file with declarations and macros for hardware UART.
This file provides function prototypes, type definitions, and constants for hardware-based UART communication on AVR0 microcontrollers.
- Date
- 2025-09-27
- Version
- 1.0 Release
- Copyright
- Copyright (c) 2025 g.raf Released under the GPLv3 License. (see LICENSE in repository)
- Note
- This file mostly becomes part of larger projects and subject to the license specified in the repository. For updates and the complete revision history, see the GitHub repository.
- See also
- https://github.com/0x007e/hal-avr-mega "AVR ATmega GitHub Repository"
Macro Definition Documentation
◆ BAUD
| #define BAUD UART_BAUDRATE |
◆ F_CPU
| #define F_CPU 12000000UL |
System clock frequency definition.
This macro defines the operating frequency of the microcontroller's clock in Hertz. It is used for timing calculations. The value should match the actual hardware clock frequency to ensure correct timing behavior.
◆ UART_BAUDRATE
| #define UART_BAUDRATE 9600UL |
Default UART communication baud rate.
Sets the default serial communication speed to 9600 baud. Common values are 9600, 19200, 38400, 57600, 115200.
- Note
- Override this macro before including uart.h for different communication speeds.
◆ UART_DATASIZE
| #define UART_DATASIZE 8 |
Number of data bits per frame (5-8).
Configures the character length transmitted/received: Valid values: 5, 6, 7, 8, 9H, 9L (default: 8).
- 5 = 5 Bits
- 6 = 6 Bits
- 7 = 7 Bits
- 8 = 8 Bits
- Note
- 8 data bits (8N1) is the most common serial configuration.
◆ UART_HANDSHAKE
| #define UART_HANDSHAKE 0 |
Flow control / handshaking mode.
Configures flow control between communicating systems:
- 0 = Disabled (default)
- 1 = Software flow control (XON/XOFF)
- 2 = Hardware flow control (RTS/CTS)
- Note
- Enables reliable data transfer when receiver buffer overflows.
◆ UART_HANDSHAKE_XOFF
| #define UART_HANDSHAKE_XOFF 0x13 |
XOFF character (transmit when not ready to receive).
◆ UART_HANDSHAKE_XON
| #define UART_HANDSHAKE_XON 0x11 |
XON character (transmit when ready to receive).
◆ UART_PARITY
| #define UART_PARITY 0 |
Parity bit configuration.
Selects parity checking for error detection:
- 0 = no parity, default
- 1 = even parity
- 2 = odd parity
- Note
- Parity adds one bit to each frame for basic error checking.
◆ UART_RXC_ECHO
| #define UART_RXC_ECHO |
Enables local echo of received characters.
When defined, each received character is automatically transmitted back through TX (echo effect). Useful for terminal applications.
- Note
- Disabled automatically if UART_TXCIE or UART_UDRIE interrupts are enabled.
◆ UART_STDMODE
| #define UART_STDMODE 1 |
Standard I/O integration mode (printf/scanf).
Enables avr-libc stdio functions over UART:
- 0 = None
- 1 = printf + scanf (default)
- 2 = printf only
- 3 = scanf only
- Note
- Requires fdevopen() setup in application code.
◆ UART_STOPBITS
| #define UART_STOPBITS 1 |
Number of stop bits per frame (1-2).
Configures stop bits signaling frame end:
- 1 = 1 Bit (default)
- 2 = 2 Bits
- Note
- Stop bits must be idle (high) level.
Function Documentation
◆ uart_clear()
| void uart_clear | ( | void | ) |
Clear UART input stream errors and discard pending character.
Calls clearerr(stdin) and getchar() to reset stream state and discard any buffered input. Used to recover from scanf() failures.
◆ uart_disable()
| void uart_disable | ( | void | ) |
Disable the UART hardware interface and reset configuration.
This function completely disables the USART peripheral by clearing TXEN/RXEN bits and all interrupt enables. Call before reconfiguring UART or entering power-save modes.
◆ uart_error_flags()
| UART_Error uart_error_flags | ( | void | ) |
Check and clear UART receive error flags.
- Returns
- UART_Error code: UART_None, UART_Frame, UART_Overrun, or UART_Parity.
Reads RXDATAH error bits (FERR, BUFOVF, PERR) and clears by reading RXDATAL. Returns first detected error or UART_None if no errors.

◆ uart_getchar()
| char uart_getchar | ( | UART_Data * | status | ) |
Blocking receive single character via UART.
- Parameters
-
[out] status Pointer to receive UART_Data status (UART_Received/UART_Fault).
- Returns
- Received character byte.
Loops calling uart_scanchar() until data available or error occurs. Status indicates if data valid (UART_Received) or error (UART_Fault).


◆ uart_init()
| void uart_init | ( | void | ) |
Initialize the UART hardware interface with configured parameters.
This function configures the USART peripheral for polling-based operation:
- Sets hardware handshake pins (RTS/CTS) if UART_HANDSHAKE==2
- Calculates and applies baud rate using setbaud.h
- Configures frame format: data bits, parity, stop bits
- Enables TX/RX with optional RXC echo and stdio stream assignment
All configuration is derived from uart.h preprocessor macros.
- Note
- Call this function once during system initialization before using UART functions.
- stdio streams (stdout/stdin) are assigned only when UART_STDMODE > 0 and no interrupts defined.
◆ uart_printf()
| int uart_printf | ( | char | data, |
| FILE * | stream ) |
UART printf stream handler for stdout redirection.
- Parameters
-
data Character to transmit. stream FILE stream pointer (unused).
- Returns
- Result of uart_putchar().
Internal callback used by avr-libc fdevopen() for printf() redirection. Only compiled when UART_STDMODE == 1 or 2 (write support).

◆ uart_putchar()
| char uart_putchar | ( | char | data | ) |
Transmit a single character via UART (blocking).
- Parameters
-
data Character byte to transmit (0-255).
- Returns
- Always returns 0 (success indicator for stdio compatibility).
Polling implementation waits for DREIF (Data Register Empty) flag before writing to UDR register. Blocks until transmission completes.
- Note
- Only available when no TX interrupts defined (UART_TXCIE/UART_UDRIE).

◆ uart_scanchar()
| UART_Data uart_scanchar | ( | char * | data | ) |
Non-blocking check for received UART data with error handling.
- Parameters
-
[out] data Pointer to store received byte (valid only if UART_Received returned).
- Returns
- UART_Data status: UART_Empty, UART_Received, or UART_Fault.
Checks RXCIF flag and validates frame using uart_error_flags(). Handles XON/XOFF software handshake if enabled. Echoes received data if UART_RXC_ECHO defined.
- Note
- Does NOT block. Returns immediately with status.

◆ uart_scanf()
| int uart_scanf | ( | FILE * | stream | ) |
UART scanf stream handler for stdin redirection.
- Parameters
-
stream FILE stream pointer (unused).
- Returns
- Received character as int (for stdio compatibility).
Internal callback used by avr-libc fdevopen() for scanf() redirection. Only compiled when UART_STDMODE == 1 or 3 (read support).
