Modern systems like arm (risc-v) are working with a systick instead of a delay. That also can be realized on a avr0 architecture with the interal rtc so TCA and TCB can be used for other things on the system.
First of all, it’s not possible to set the
rtctimer exactly to 1 millisecond! The internal32.768 kHzoscillator isn’t divisible to exactly 1ms, but it’s sufficient for approximate counting instead of a delay.
First of all let´s take a look into the avr0 clock control in the family datasheet (DS40002015B) on page 83.
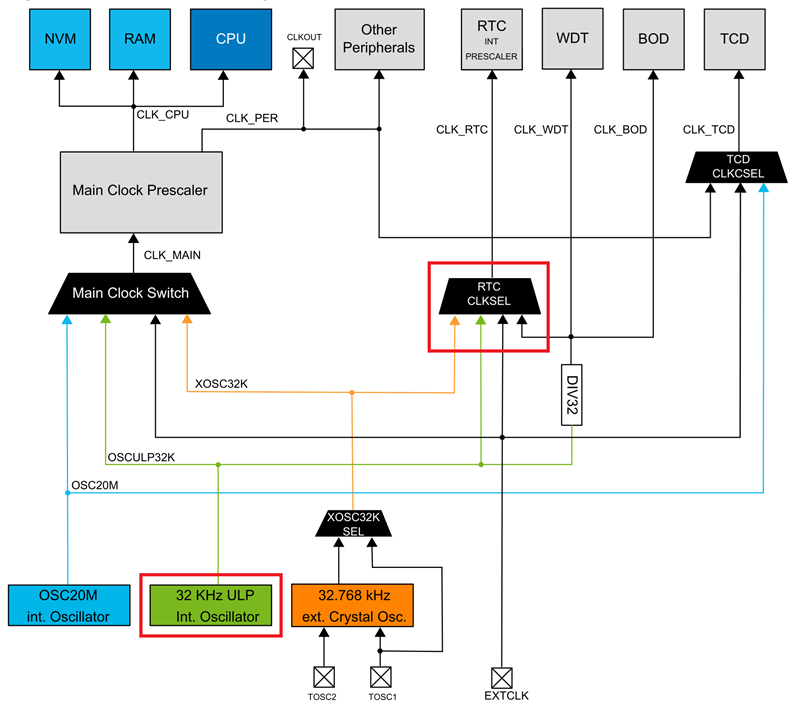
There we can see that it it possible to route the internal 32.768 kHz oscillator to the rtc. Before the timer can be switched on we need to think about the ticks to get an interrupt every ~1 ms. Let´s do some math:
Every $30.5176 \mu\text{s}$ increments $+1$. So now we can calculate the time shift to get to $1ms$.
\[Ticks_{1ms} = \frac{1ms}{T_{Period}} = \frac{1ms}{30.5176 \mu\text{s}} = 32.77\]There we see that the ticks are not an integer and the interrupts can´t occur exactly at $1ms$!
\[T_{INT,min} = (int)(32.77) * 32.768 kHz = ~0,98 ms\] \[T_{INT,max} = ((int)(32.77) + 1) * 32.768 kHz = ~1,007 ms\]The best fit seems to be at $T_{INT,max}=~1,007 ms$ so the rtc overflow register (PER) should be set to $33$ ticks with a prescaler of 1.
void rtc_init(void)
{
RTC.INTCTRL = RTC_OVF_bm;
RTC.CLKSEL = RTC_CLKSEL_INT32K_gc;
// RTC Overflow
while (RTC.STATUS & RTC_PERBUSY_bm);
RTC.PER = 0x0021; // 33 -> base16 -> 0x0021
while (RTC.STATUS & RTC_CTRLABUSY_bm);
RTC.CTRLA = RTC_PRESCALER_DIV1_gc | RTC_RTCEN_bm;
}
Let´s check if the generated time fit´s the calculated time. To do this we will start to toggle any available pin on an avr0 (in this case an ATTiny1604).
The initialization of the main system clock is not necessary, in cause of that we are not using any program code in
while(1).
#include <avr/io.h>
#include <avr/interrupt.h>
ISR(RTC_CNT_vect)
{
PORTA.OUTTGL = PIN0_bm;
RTC.INTFLAGS = RTC_OVF_bm;
}
int main(void)
{
PORTA.DIRSET = PIN0_bm;
rtc_init();
sei();
while(1)
{
}
}
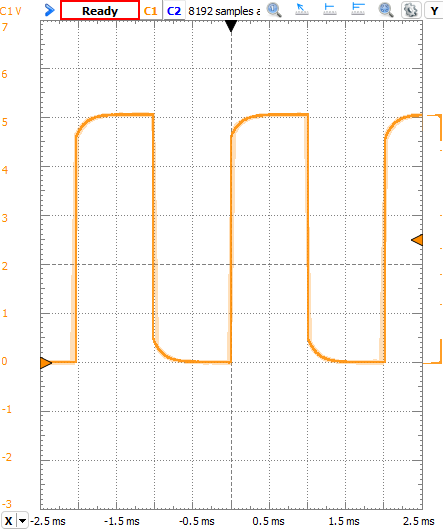
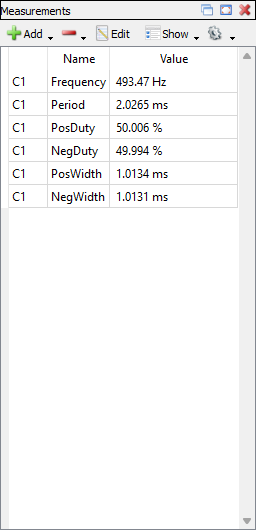
Now we take a look at the generated signal with an Analog Discovery.
Generated signal with 0x0021 setup.
Generated signal with 0x0020 setup.
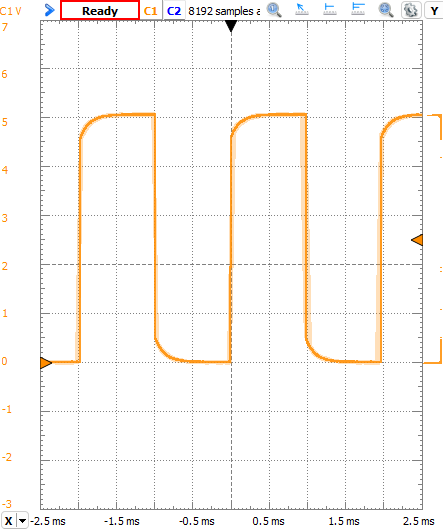
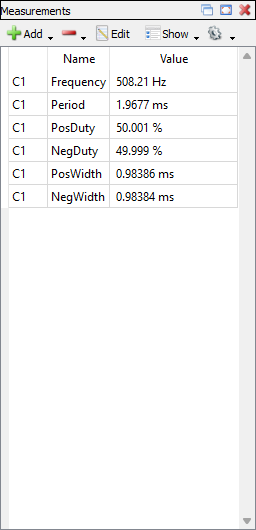
There we are. In this case the value 0x0021 seems to fit better than the value 0x0020. The drift with 0x0021 is a bit lower than with 0x0020 to $1ms$ and it seems to be better to have a positive instead of a negative timeshift.
Generating a systick with the rtc
To keep things cleaned up, just lets use some libraries for the initialization of rtc and the system clock.
git clone https://github.com/0x007E/hal-avr0-system.git ./hal/avr0
mv ./hal/avr0/hal-avr0-system ./hal/avr0/system
git clone https://github.com/0x007E/hal-avr0-rtc.git ./hal/avr0
mv ./hal/avr0/hal-avr0-rtc ./hal/avr0/rtc
Now we can just use this libraries to initialize the system clock to $20MHz$ and the rtc clock as previousely defined and add a software systick timer.
#include <avr/io.h>
#include <avr/interrupt.h>
#include <util/atomic.h>
#include "./hal/avr0/system/system.h"
#include "./hal/avr0/rtc/rtc.h"
volatile unsigned int systick;
// Called every ~1ms
ISR(RTC_CNT_vect)
{
systick++;
RTC.INTFLAGS = RTC_OVF_bm;
}
int main(void)
{
system_init();
rtc_init();
sei();
PORTA.DIRSET = PIN0_bm;
unsigned int last_value = 0;
while(1)
{
unsigned int temp = 0x00;
ATOMIC_BLOCK(ATOMIC_RESTORESTATE)
{
temp = systick;
}
if((temp - last_value) >= 1000UL)
{
PORTA.OUTTGL = PIN0_bm;
last_value = temp;
}
}
}
The
ATOMIC_BLOCKis necessary because theavr0architecture works with8 bitsand thesystickvariable16 bits. The calculation therefore needs two operations on the CPU. To prevent that the interrupt get´s executed while the value is written fromsysticktotempand changes the value during the comparison the block is required!
Everybody knows that programmers are lazy so there is still another library to do this stuff.
git clone https://github.com/0x007E/utlis-systick ./utils
mv ./utils/utils-systick ./utils/systick
#include <avr/io.h>
#include <avr/interrupt.h>
#include <util/atomic.h>
#include "./hal/avr0/system/system.h"
#include "./hal/avr0/rtc/rtc.h"
#include "./utils/systick/systick.h"
SYSTICK_Timer systick_timer;
void systick_timer_wait_ms(unsigned int ms)
{
systick_timer_wait(ms);
}
// Called every ~1ms
ISR(RTC_CNT_vect)
{
systick_tick();
RTC.INTFLAGS = RTC_OVF_bm;
}
int main(void)
{
system_init();
rtc_init();
sei();
systick_init();
PORTA.DIRSET = PIN0_bm;
while(1)
{
PORTA.OUTTGL = PIN0_bm;
systick_timer_wait_ms(250UL);
// Or just non-blocking
if (systick_timer_elapsed(&systick_timer))
{
PORTA.OUTTGL = PIN0_bm;
ystick_timer_set(&systick_timer, 250UL);
}
}
}
Feel free to use this libraries in any case of your private or comercial projects!